How to motor move one direction or both direction :
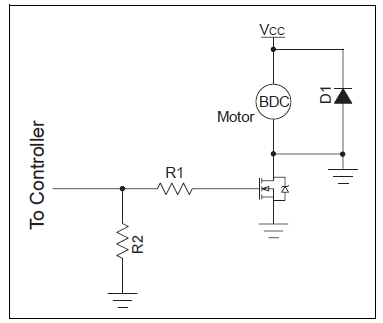
The first is a low-side drive and the second is a high-side drive. The advantage to using the low-side drive is that a FET driver is not typically needed.
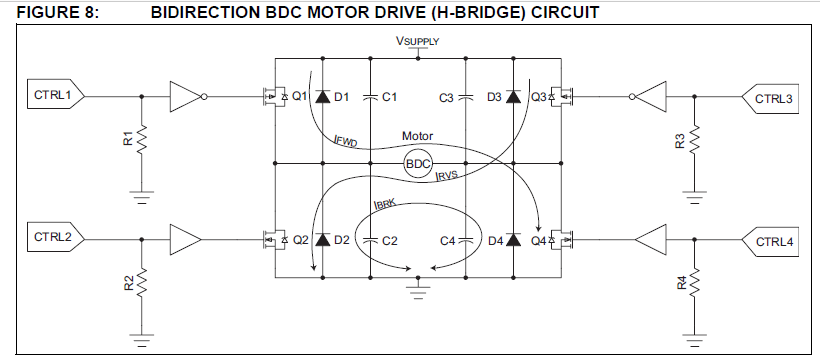
Bidirectional control of a BDC motor requires a circuit called an H-bridge. The H-bridge, named for it’s schematic appearance, is able to move current in either direction through the motor winding. To understand this, the H-bridge must be broken into its two sides, or half-bridges.
High side driver : high side driving while driving circuit in power supply side
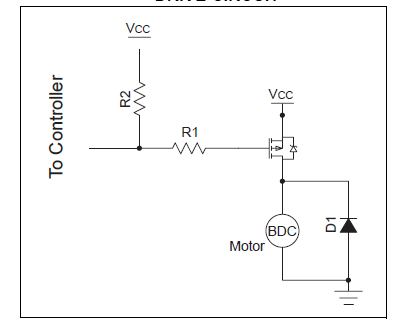
Low side drive :low side driving while driving circuit in ground side
H bridge
how to control the speed of motor :VAVERAGE = D × VSUPPLY
Speed and duty cycle are proportional to one another. For example, if a BDC motor is rated to turn at 15000 RPM at 12V, the motor will (ideally) turn at 7500 RPM when a 50% duty cycle waveform is applied across the
motor.
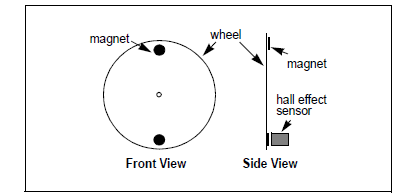
Sensored Feedback:
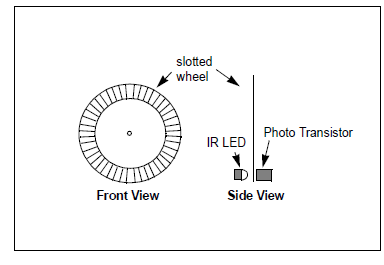
The most common are optical encoders and hall effect sensors. Optical encoders are made up of several components. A slotted wheel is mounted to the shaft at the non-driving end of the motor. An infrared LED provides a light source on one side of the wheel and a photo transistor detects light on the other side of the wheel.
Light passing through the slots in the wheel will turn the photo transistor on. As the shaft turns, the photo transistor turns on and off with
the passing of the slots in the wheel
Hall effect sensors are also used to provide speed feedback. Like optical encoders, hall effect sensors require a rotary element attached to the motor and a stationary component. The rotary element is a wheel with one or more magnets positioned on its outer rim. A stationary sensor detects the magnet when in passes and generates a TTL pulse